Neural Network with julia
After a series of previous posts we hav learned the key steps of making a Machine Learning:
With all of this we are in a position to construct a fully functional neural network. We combine knowledge from all of these previous posts and try to construct a fully functional multi-layer multi-node Neural Network.
Setup
For a fully functional network, similar to last post, we can make multiple layer multiple nodes.
%% {init: {'theme':'dark'}} %%
graph LR;
x_1[x1] --> a1((a01))-->|W111| b11((b11))
x_2[x2] --> a2((a02)) -->|W121| b11
x_3[x3] --> a3((a03)) -->|W131| b11
a1 --> |W112| b12((b12))
a2 --> |W122| b12
a3 --> |W132| b12
b11 --> |W211| b21((b21)) --> y1((y1))
b12 --> |W221| b21
b11 --> |W212| b22((b22)) --> y2((y2))
b12 --> |W222| b22
A word on notation (again) I have used superscript to mean the layer number.
Lets introduce an intermediate variable \(z\) which, we called so far the activation. For the first layer the intermediate variable \(z^1\) is then
Here \(a^0_j\) is the input vector, for the notational consistancy. We can generalize this expression to any layer \(l\) as
The activation in the \(l\)supth layer \(a^l\) is then some (non linear) function of the variable \(z^l\)
Lets again declare the loss function
Where \(y\) is the predicted value and \(\hat y\) is the true value.
In julia this exactly translates as
L(y,ŷ) = sum( (y - ŷ) .^2 )We can follow the post on back propagation and gradient descent to understand the algorithm. The implementation of the algorithm is exactly same is shown in that post. The (almost) exact copy of that code is here. The only change is that the \(W\) variable is now a matrix and \(b\) is a vector with \(a=x\) being a vector.
function train!(x,y)
# Feed forward
a⁰ = x
a¹ = W' * a⁰ + b
# Calculate error
δ¹ = (a¹ - y)
# Single layer so no backpropagation
# Updaet weights
global W -= β .* a⁰ * δ¹'
global b -= β .* δ¹
return a¹
endTraining network
Lets first generate some training sample. We want a list of vectors. One I deaa I have for generating training sample is to start with three sets \(x_1 = \lbrace 1, 2, \cdots n\rbrace\), \(x_2 = \lbrace 1, 2, \cdots n\rbrace\) , \(x_3 = \lbrace 1, 2, \cdots n\rbrace\) for each component of vector \(x\) to form the vector just take the cartesian product. For that matter lets define a cartesian product function in julia.
×(x₁,x₂) = [[i;j] for i in x₁ for j in x₂]We can generate the component set simply as
x1_train,x2_train,x3_train = 1.0:9.0, 1.0:9.0, 1.0:9.0Finally the training set then is
x_train = x1_train × x2_train × x3_trainFor our purpose we can start with any arbitrary weight matrix \(W\) and any arbitrary bias vector \(b\).
W = rand(3,2)
b = vec(rand(2,1))Lets also set some learning rage \(\beta\)
β = 9e-3Now we can train the network with our training samples. This again is the exact identical copy of the code in the backpropagation post.
epoch=500
errs = []
for n in 1:epoch
for (i,(x,y)) in enumerate(zip(x_train,y_train))
ŷ = train!(x,y)
error = loss(y,ŷ)
push!(errs,error)
print(f"\rEpoch {$n:>2d}: {$i:>02d}/{$(length(x_train)):>02d} error = {$error:.3e}")
#sleep(.15)
end
println("")
endEpoch 1: 729/729 error = 1.301e-05
Epoch 2: 729/729 error = 3.603e-07
Epoch 3: 729/729 error = 2.187e-07
Epoch 4: 729/729 error = 1.912e-07
.
.
.
Epoch 496: 729/729 error = 1.010e-28
Epoch 497: 729/729 error = 2.524e-28
Epoch 498: 729/729 error = 8.078e-28
Epoch 499: 729/729 error = 2.524e-28
Epoch 500: 729/729 error = 8.078e-28We see that the error goes down at the end of each epoch. Telling us that the back propagation works.
We can print the final matrices \(W\) and \(b\) we will see that they are very close to the true values we wanted to start with.
print(W)3×2 Matrix{Float64}:
1.0000000000001126 2.999999999999939
1.999999999999995 2.000000000000002
2.9999999999999982 1.0000000000000002print(b)2-element Vector{Float64}:
3.9999999999990083
5.228242039274647e-13These are indeed the values we wanted \(W\) and \(b\) converge to.
Characterization
I have caught error in each iteration in the array errs which can be used to make few plots. We can reshape the error list such that each row is error progression in each epoch.
ers = reshape(errs,length(x_train),epoch)Lets plot the final error in each epoch for all the epochs.
le = ers[end,:]Now we can make plots.
p = plot(xlabel="Epoch",ylabel="MSE",title="Error progression")
plot!(le,label="β=$β")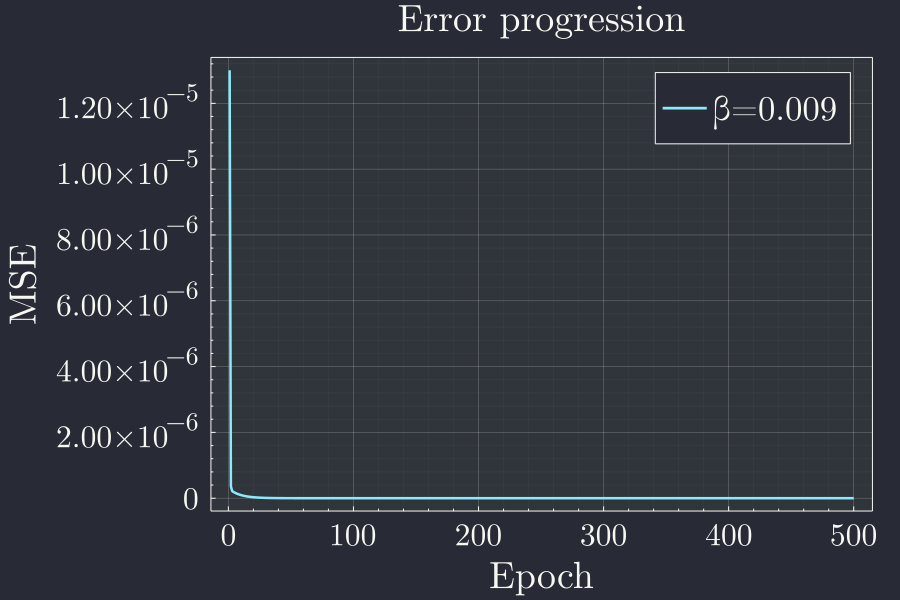
This plot clearly indicates that the error goes very quickly down but there a blog on the left corner. Lets see what's going on there with a log plot.
p = plot(xlabel="Epoch",ylabel="MSE",title="Error progression logy",yscale=:log10)
ylims!(1e-9,1e3)
x = 1:4900
plot!(x,le[x],label="β=$β")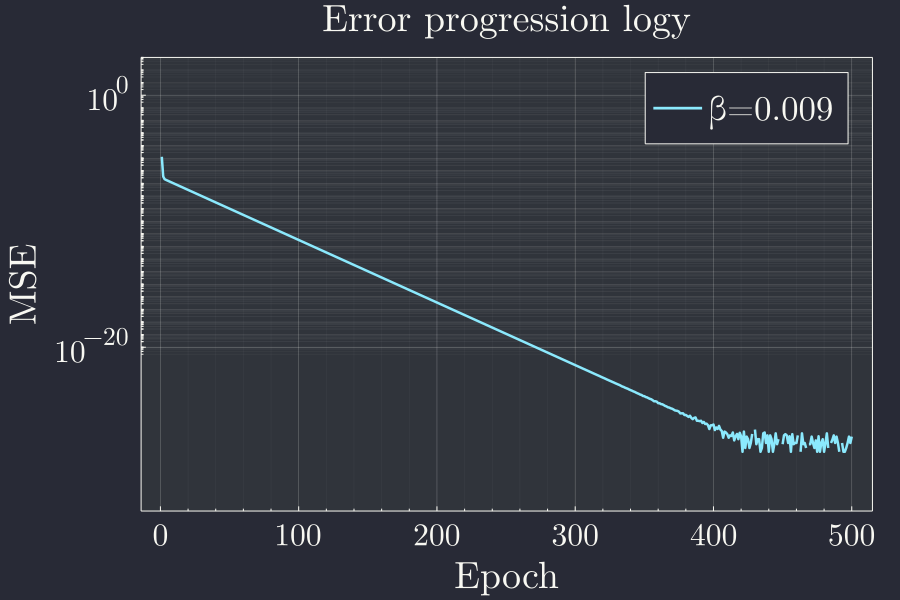
Looks like there is lot of wiggle towards the end but the error stalls there. It rapidly goes down for the first 400 epochs or so. Lets try to catch a single(or a few) wiggle and see what is happening.
p = plot(xlabel="Epoch",ylabel="MSE",title="Error progression logy",yscale=:log10)
ylims!(1e-9,1e3)
x = 250:500
plot!(x,le[x],label="β=$β")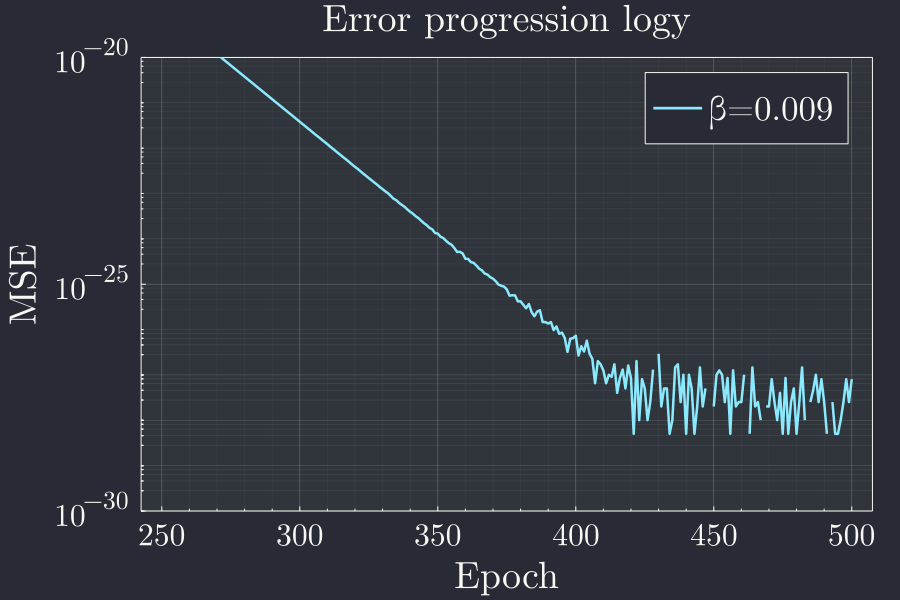
I am not sure what to make of this, but since this is vanishingly small value for error I am not even sure about the precision of the numbers here. Might be worth investigating later.
Conclusion
With almost the same code as for single node in each layer, we are able to simply turn the Weights and biases into matrix and be able to handle the multiple node in each layer case very easily. Its so nice to also learn that the linear learnign works quite well when there is mixing of input variables in the output.
Now that we have built a neural network with single layer, two layers and multiple nodes in each layers, our next big target is to make a network with all these. Apply backpropagation to a multilayered network with multiple node in ecah layer. That shold be the ultimate linear regression neural network. Until then bye. Adios, hasta pronto.